Les professeurs suivants sont impliqués dans ce laboratoire :
 La station à multitraitement, de LabVolt, est utilisée dans les cours sous-gradués d'instrumentation et de commande (GMF443, GMF482). Elle est composée de postes de travail conçus pour les pratiques de mesure, de commande et de dépannage de variables de pression, débit, et de niveau.
La station à multitraitement, de LabVolt, est utilisée dans les cours sous-gradués d'instrumentation et de commande (GMF443, GMF482). Elle est composée de postes de travail conçus pour les pratiques de mesure, de commande et de dépannage de variables de pression, débit, et de niveau.
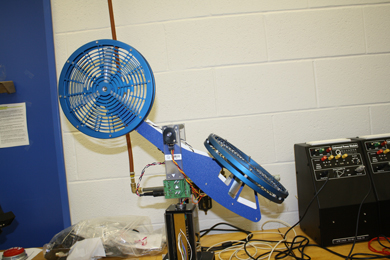 Le système électromécanique à 2-DDL pour un simulateur d'engin de vol, qui offre diverse modes de commandes linéaires et non linéaires. Il est utilisé dans des cours (sous-gradués et post-gradués) de commande (GMF443, GA501, GM551). L'objectif est la conception des systèmes de commande pour manipuler le tangage et le roulis en utilisant deux moteurs à courant continu montés sur les deux extrémités d'un cadre rectangulaire et entraînant deux hélices.
Le système électromécanique à 2-DDL pour un simulateur d'engin de vol, qui offre diverse modes de commandes linéaires et non linéaires. Il est utilisé dans des cours (sous-gradués et post-gradués) de commande (GMF443, GA501, GM551). L'objectif est la conception des systèmes de commande pour manipuler le tangage et le roulis en utilisant deux moteurs à courant continu montés sur les deux extrémités d'un cadre rectangulaire et entraînant deux hélices.
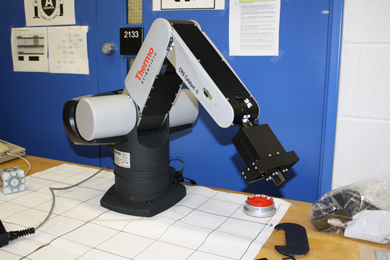 Le robot 5-DDL à architecture ouverte (de Quanser) est utilisé dans les cours (sous-gradués et post-gradués) de robotique (GMF437, GA501) pour étudier les concepts de la modélisation, la cinématique, la dynamique et la commande. Il a la possibilité d'être utilisé avec toutes les capacités de commande industrielle CRS préinstallée dans des expériences de planification des tâches ou avec une architecture ouverte pour examiner les aspects complexes de commande dynamique et cinématique.
Le robot 5-DDL à architecture ouverte (de Quanser) est utilisé dans les cours (sous-gradués et post-gradués) de robotique (GMF437, GA501) pour étudier les concepts de la modélisation, la cinématique, la dynamique et la commande. Il a la possibilité d'être utilisé avec toutes les capacités de commande industrielle CRS préinstallée dans des expériences de planification des tâches ou avec une architecture ouverte pour examiner les aspects complexes de commande dynamique et cinématique.

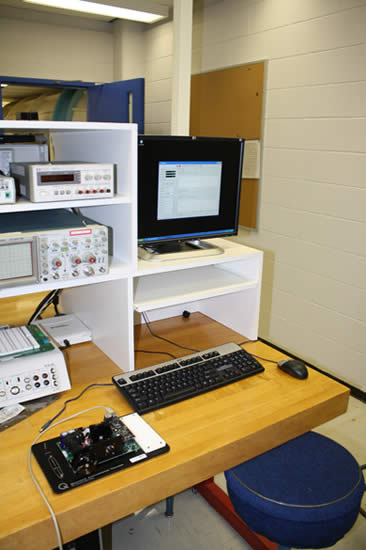
Le dispositif d'entraînement de moteur à courant continu QET (de Quanser) est utilisé dans le cours (sous-gradué) de commande (MEEGMF443) pour mettre en œuvre les techniques de modélisation et de commande de vitesse et de positionnement et à étudier également la robustesse. Il offre un moyen idéal pour démontrer les principes fondamentaux d'ajustement de commande du moteur.