The following professors are involved with this lab:

The multi-process station, from LabVolt, is used in instrumentation and control UG courses (MEE443, MEE482). It consists of self-contained workstations designed for hands-on training in the measurement, control, and troubleshooting of pressure, flow, and level processes.
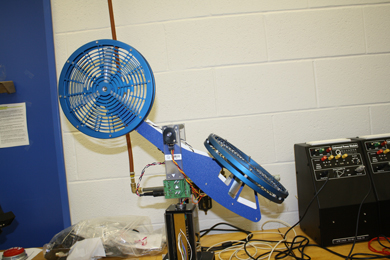
The 2-DOF electromechanical system for a flight engine simulator is offering diverse frameworks of linear and nonlinear controls. It is used in control (UG and PG) courses like (MEE443, AE501, ME551). The objective is the design of control systems to manipulate the pitch and yaw using two DC motors mounted at the two ends of a rectangular frame and driving two propellers.
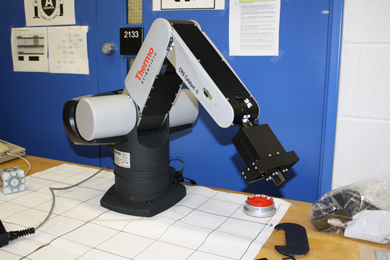
The 5-DOF open architecture robot (from Quanser) is used in robotics (UG and PG) courses (MEE437, AE501), to deal with modeling, kinematics, dynamics and control concepts. It has the capability to be used with full features of the preinstalled CRS industrial controller for task planning experiments or with an open architecture design to examine complex dynamic and kinematic control issues.

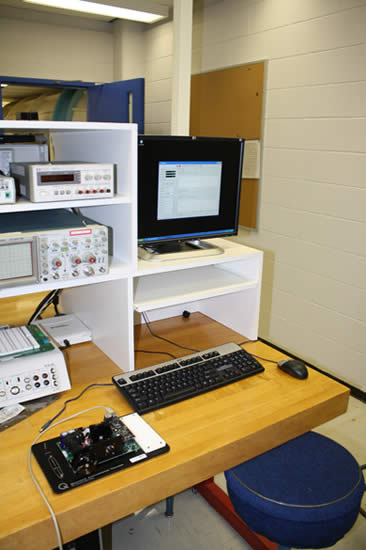
The QET DC Motor Control trainer (from Quanser) is used in UG control course (MEE443) to implement modeling and control techniques for speed and positioning and also to study the robustness. It provides an ideal way to demonstrate the fundamentals of motor control tuning.